고정 헤더 영역
SeongWonTech · 성원기술
정밀한 타이밍이
검사 품질을 결정합니다
FPGA 기반 머신비전 동기화 솔루션 전문기업.
2차전지·반도체·자동차 라인 검사의 트리거·조명·카메라를 정밀하게 제어합니다.

상세 컨텐츠
본문
이 글에서는 고속 라인에서 검사 누락을 막는 핵심 기술인 파이프라인 트리거(Pipeline Trigger)의 원리를 정리했습니다. 촬영·이미지 처리·결과 출력을 병렬화하는 구조 관점에서, 단일 처리 구조 대비 검사 속도와 안정성이 어떻게 개선되는지 함께 설명합니다.
Machine Vision White Paper
파이프라인 트리거(Pipeline Trigger) 완전 정리
고속 검사 시스템에서 왜 누락이 생기는지, 그리고 왜 병렬 구조가 필요한지 쉽게 정리했습니다.
파이프라인 트리거는 촬영과 처리를 동시에 수행해 라인 속도를 올려도 누락이 생기지 않게 하는 타이밍 구조입니다. 직렬 방식의 한계와 병렬 구조의 차이를 그림 없이도 이해되도록 정리했습니다.
왜 이런 문제가 생길까?
머신비전 시스템을 운영하다 보면 이런 문제가 반드시 발생합니다.
“라인 속도를 올리면 검사 누락이 생긴다”
“카메라는 빠른데 시스템이 못 따라온다”
이 문제의 핵심 원인은 단 하나입니다.
촬상(Image Acquisition)과 처리(Processing)가 직렬 구조이기 때문입니다.
기존 트리거 방식의 구조 (문제의 시작)
일반적인 시스템은 아래와 같이 동작합니다.
① 물체 감지 → 트리거 발생
② 이미지 촬영
③ 데이터 전송 및 처리
④ 처리 완료 후 → 다음 트리거 허용
즉, Stop → Process → Next 구조입니다.
여기서 발생하는 문제
✔ Stop-and-Go 현상
✔ 고속에서 트리거 무시 (Miss Trigger)
✔ 검사 누락 발생
✔ Tact Time 증가
결론: 라인 속도 ≠ 검사 속도
해결 방법: 파이프라인 트리거 (Pipeline Trigger)
핵심 개념은 매우 간단합니다.
왜 성능이 폭발적으로 올라갈까?
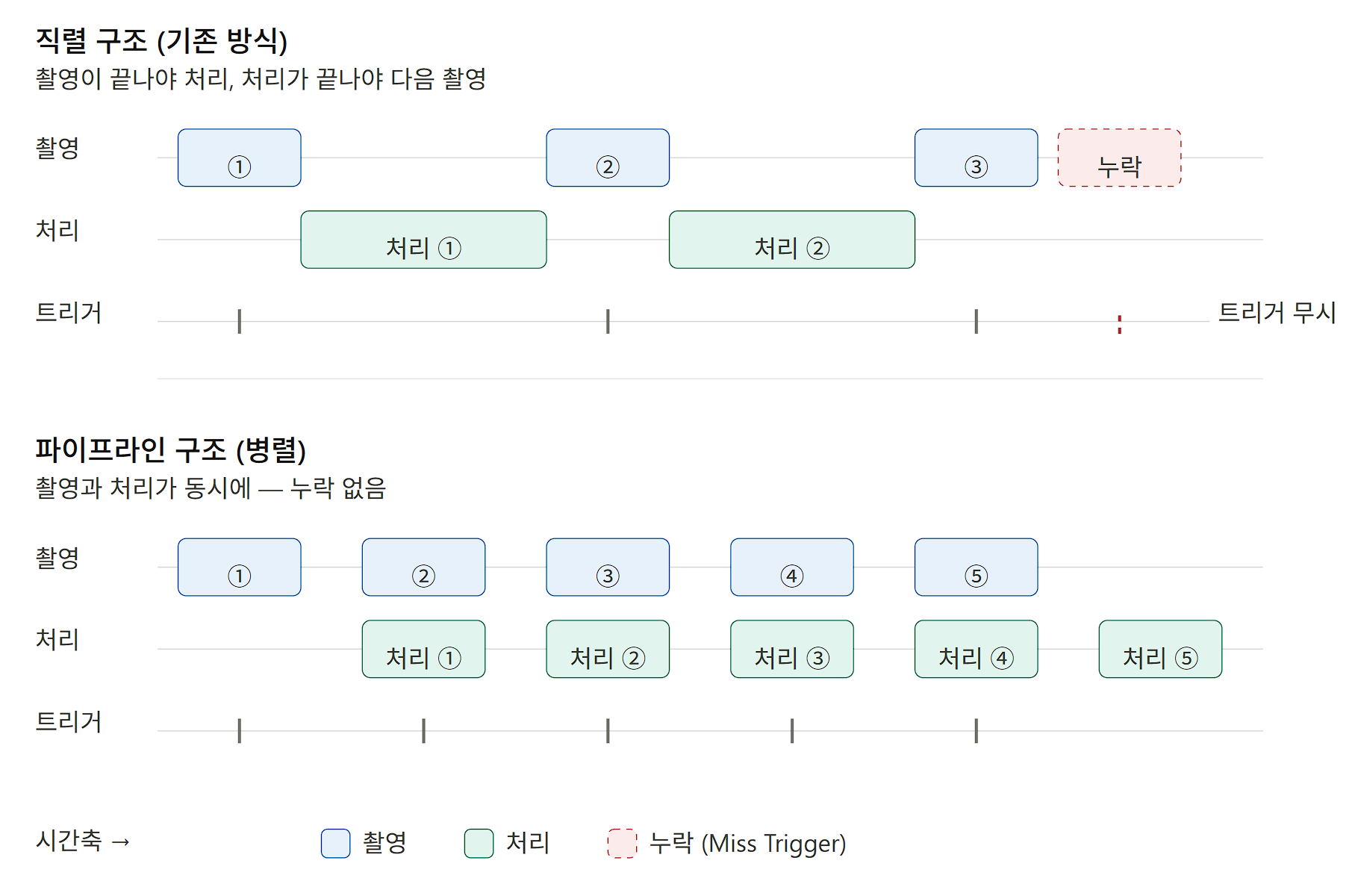
기존 시스템
촬영 끝나야 처리
처리 끝나야 다음 촬영
완전 직렬 구조
파이프라인 구조
촬영 중에도 처리 진행
처리 중에도 다음 촬영 진행
완전 병렬 구조
실제 효과 (현장 기준)
✔ 검사 누락 0% 수준
✔ 고속 라인에서도 안정성 유지
✔ Tact Time 대폭 감소
✔ 시스템 가동률 증가
특히 2차전지 / 반도체 / 디스플레이 분야에서 매우 중요합니다.
왜 FPGA 기반이어야 하는가?
이 구조는 PC나 PLC 기반으로는 안정적으로 구현하기 어렵습니다.
❌ PC / Windows
스케줄링 지연
인터럽트 불확실성
❌ PLC
Scan Time 존재
고속 처리 한계
✅ FPGA
Zero Delay (0ns)
완전 병렬 처리
하드웨어 레벨 제어
Pipeline Trigger는 FPGA 전용 영역에 가깝습니다.
핵심 요약
“검사는 속도가 아니라 구조가 만든다”
이런 곳에 반드시 필요합니다
✔ 고속 라인 스캔 검사
✔ 물류 자동화 시스템
✔ 2D + 3D 복합 검사
✔ 불규칙 간격 제품 라인
결론
파이프라인 트리거는 단순한 기능이 아닙니다.
검사 시스템의 구조 자체를 바꾸는 기술입니다.
Pipeline Trigger / Machine Vision / FPGA Architecture
제품 문의 & 기술 자료 요청
성원기술 · SWTEC Co., Ltd.
#ETIO #SCP3D #SIGNALSCOPE #성원기술 #머신비전 #2차전지검사 #반도체계측
'제품 기술 이야기 > 기초 원리' 카테고리의 다른 글
| 정밀 검사 트리거 체인 설계 — 두 계층으로 나눠 본 결정성 비교 (0) | 2026.06.23 |
|---|---|
| 파이프라인 트리거 구조 완전정리 / 고속 검사 누락 해결 가이드 (0) | 2026.03.24 |
| 트리거 분배기 선정 가이드 — 채널 수·동기화 정밀도·FPGA 처리 방식 비교 (0) | 2026.03.23 |
| 머신비전 기초 완전정리 / 시스템 구성, 렌즈, 트리거 한눈에 보기 (0) | 2026.03.20 |
| 머신비전 렌즈 종류 완전정리 / 마운트, BFL, 실전 선택 가이드 (0) | 2026.03.20 |




