고정 헤더 영역
SeongWonTech · 성원기술
정밀한 타이밍이
검사 품질을 결정합니다
FPGA 기반 머신비전 동기화 솔루션 전문기업.
2차전지·반도체·자동차 라인 검사의 트리거·조명·카메라를 정밀하게 제어합니다.

상세 컨텐츠
본문
트리거 분배기란? — 머신비전 트리거·엔코더 기초 입문 가이드
머신비전 시스템을 처음 설계할 때 가장 많이 놓치는 부분이 바로 트리거(Trigger)와 엔코더(Encoder)입니다.
카메라, 렌즈, 조명은 신경 쓰면서도 “언제 찍느냐”는 제대로 설계하지 않는 경우가 많습니다. 하지만 실제 검사 정확도를 좌우하는 것은 촬영 타이밍, 즉 트리거 시스템입니다.
핵심 한 줄
머신비전 성능은 카메라만이 아니라 정확한 타이밍에서 결정됩니다.
머신비전 시스템 설계에서 가장 많이 놓치는 트리거와 엔코더 개념을 입문자도 이해할 수 있게 정리했습니다. 트리거 종류, 엔코더 역할, 검사 정확도와의 관계까지 한 번에 확인할 수 있습니다
1. 트리거(Trigger)란 무엇인가?
트리거는 한마디로 카메라에게 “지금 찍어라”라고 명령하는 신호입니다.
쉽게 설명하면
스마트폰 → 버튼 누르면 촬영
머신비전 → 트리거 신호 들어오면 촬영
2. 왜 트리거가 중요한가?
트리거가 중요한 이유는 단 하나입니다.
정확한 타이밍 = 정확한 검사
예시
제품이 이동 중인데 타이밍이 틀어지면
→ 이미지가 흔들림 / 위치 틀어짐
→ 검사 실패
3. 트리거 종류 (현장에서 가장 많이 쓰는 것)
① 외부 트리거 (External Trigger)
가장 기본적인 방식입니다.
- 센서 / PLC / 버튼 → 카메라 트리거
- 제품 감지 후 촬영
- 가장 많이 사용됨
② 프리런 (Free Run)
- 카메라가 계속 촬영
- 일정 주기로 자동 촬영
- 정지 대상 / 저속 검사에 사용
③ 엔코더 트리거 (Encoder Trigger)
가장 중요한 방식이며, 고속 검사에서 핵심입니다.
- 이동 거리 기준으로 촬영
- 위치 기준 촬영
- 라인스캔 / 고속 검사 필수
4. 트리거 분배기란?
트리거 분배기는 하나의 트리거 신호를 여러 장비로 정확하게 나누는 장치입니다.
왜 필요할까?
현장에서는 이런 상황이 많습니다.
- 카메라 여러 대
- 조명 동기화 필요
- 검사 장비 여러 개 연결
이때 신호를 단순하게 나누면 문제가 생깁니다.
문제 예시
신호 지연 (Delay)
타이밍 어긋남
노이즈 발생
결과: 검사 정확도 하락
트리거 분배기의 역할
- 신호를 동일한 타이밍으로 분배
- 지연 최소화
- 노이즈 제거
- 동기화의 핵심 장비
5. 엔코더(Encoder)란?
엔코더는 “얼마나 움직였는지”를 알려주는 센서입니다.
쉽게 이해하면
바퀴가 몇 바퀴 돌았는지 측정
이동 거리 계산
엔코더 신호 종류
- A상 / B상 : 방향 + 위치
- Z상 : 원점
이 신호를 이용해 정확한 위치를 계산합니다.
6. 왜 엔코더가 중요한가?
특히 라인스캔에서는 엔코더가 필수입니다.
이유: 시간 기준이 아니라 위치 기준으로 찍어야 하기 때문
예시
속도가 변하는 경우
시간 기준 촬영 → 이미지 늘어짐
위치 기준 촬영 → 정확한 이미지
그래서 엔코더를 사용합니다.
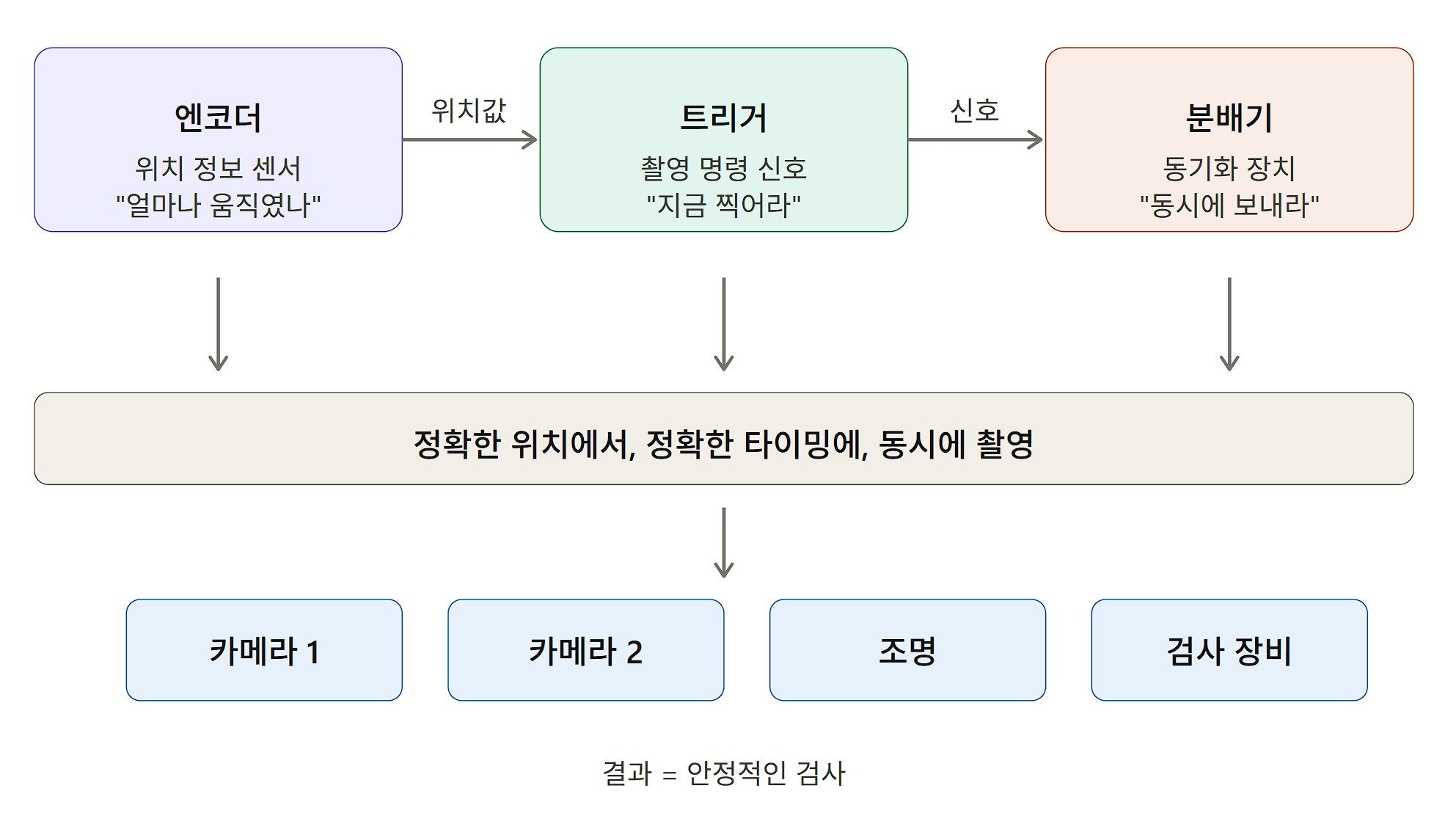
7. 트리거 + 엔코더 = 진짜 핵심
머신비전에서 가장 중요한 공식은
“정확한 위치에서 정확한 타이밍에 촬영”
엔코더 → 위치 계산
트리거 → 촬영 신호
분배기 → 동기화
이 3개가 맞아야 안정적인 검사 가능
8. 트리거 분배기가 중요한 이유 (실무 핵심)
① 멀티 카메라 동기화
여러 카메라를 동시에 촬영해야 할 때 필요합니다.
② 조명 동기화
카메라와 동시에 조명을 점등해야 할 때 중요합니다.
③ 고속 검사 안정화
타이밍 오차를 줄여 고속 검사 안정성을 높입니다.
그래서 FPGA 기반 장비가 중요한 이유가 바로 여기에 있습니다.
9. 현장에서 자주 생기는 문제
문제 1. 타이밍 어긋남
카메라마다 촬영 시점이 다릅니다.
문제 2. 이미지 늘어짐
엔코더 없이 시간 기준 촬영을 하면 발생하기 쉽습니다.
문제 3. 노이즈
신호 품질이 불안정하면 전체 검사 신뢰도가 떨어집니다.
이 문제들의 상당수는 트리거 / 엔코더 문제에서 시작됩니다.
10. 실무 설계 흐름
머신비전 설계는 아래 순서로 접근하는 것이 좋습니다.
- 검사 대상 확인
- FOV 결정
- 렌즈 선택
- 카메라 선택
- 트리거 설계
- 엔코더 연동
트리거는 “마지막 옵션”이 아니라 핵심 설계 요소입니다.
11. 핵심 요약
- 트리거 = 촬영 타이밍 신호
- 엔코더 = 위치 정보 센서
- 트리거 분배기 = 동기화 장치
결론 : 머신비전 성능은 카메라가 아니라 “타이밍”에서 결정됩니다.
마무리
많은 사람들이 머신비전을 “카메라 성능 경쟁”이라고 생각합니다.
하지만 실제 현장은 다릅니다.
좋은 이미지 = 좋은 타이밍
그리고 그 중심에는 트리거 + 엔코더 + 분배기가 있습니다.
한 줄 결론
머신비전은 “언제 찍느냐”가 “무엇을 찍느냐”보다 더 중요합니다.
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━
📌 다음 글 — 트리거 분배기만으로는 왜 부족한가?
트리거와 엔코더 개념을 이해했다면,
다음 질문은 자연스럽게 이것입니다.
"단순 분배기로 구성했는데 왜 Miss Trigger가 생길까?"
그 원인과 FPGA 기반 해결법을 다음 글에서 이어서 정리했습니다.
→ 다음 글 읽기: 트리거 분배기 한계 / Miss Trigger 해결법
https://swtec.tistory.com/142
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━
제품 문의 & 기술 자료 요청
성원기술 · SWTEC Co., Ltd.
#ETIO #SCP3D #SIGNALSCOPE #성원기술 #머신비전 #2차전지검사 #반도체계측
다음 단계로 읽기 트리거 기본 개념을 이해하셨다면, 실제 현장에서 발생하는 Miss Trigger 문제와 FPGA 기반 해결책은 다음 글에서 확인하세요. → 머신비전 트리거 분배기 한계 / Miss Trigger 해결법
'제품 기술 이야기 > 기초 원리' 카테고리의 다른 글
| 파이프라인 트리거 구조 완전정리 / 고속 검사 누락 해결 가이드 (0) | 2026.03.24 |
|---|---|
| 파이프라인 트리거란? — 촬영·처리 병렬구조로 머신비전 검사 누락 막는 방법 (0) | 2026.03.24 |
| 머신비전 기초 완전정리 / 시스템 구성, 렌즈, 트리거 한눈에 보기 (0) | 2026.03.20 |
| 머신비전 렌즈 종류 완전정리 / 마운트, BFL, 실전 선택 가이드 (0) | 2026.03.20 |
| 산업용 머신비전 카메라 선택 가이드 — 해상도·프레임 속도·인터페이스 기준 정리 (0) | 2026.03.20 |




