고정 헤더 영역

상세 컨텐츠
본문
📉 Signal Scope 실전 분석으로 이해하는 A/B 위상과 타이밍 오류
✅ 이런 문제가 있다면 엔코더 파형 분석이 필요합니다
- 속도는 일정한데 위치 값이 출렁임
- 3D 프로파일이 간헐적으로 튐
- 장비는 정상인데 결과가 랜덤하게 흔들림
- PLC에서는 문제 없는데 카메라에서 오류 발생
👉 이런 문제는 대부분 엔코더 파형이 깨지거나 노이즈가 섞인 상태에서 시작됩니다.
✅ 결론부터 말하면
엔코더 파형을 보면 장비의 모든 움직임과 타이밍 문제가 그대로 드러납니다.
그리고 그 파형을 가장 정확하게 보여주는 장치가 바로 Signal Scope입니다.
🔁 엔코더 기본 파형: A/B 채널 이해하기
엔코더는 두 개의 신호(A상, B상)를 사용해 위치 · 방향 · 속도를 계산합니다.
A/B 위상의 기본 관계는 90° 위상차입니다.
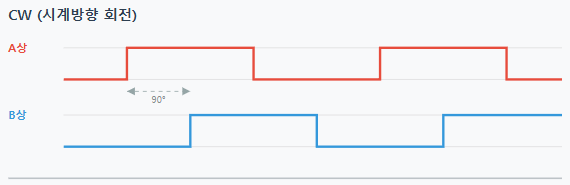


✔ 이 위상차를 이용해:
- 이동 방향 판단
- 펄스 수로 이동 거리 계산
- 펄스 간격으로 속도 계산
- 이동 방향 판단
- 펄스 수로 이동 거리 계산
- 펄스 간격으로 속도 계산
📌 A/B 파형이 깨지면 → 모든 계산이 틀어지고 → 머신비전 검사 품질이 붕괴됩니다.
✅ Signal Scope로 보는 “정상 엔코더 파형”
정상 상태의 엔코더 파형은 다음과 같은 특징을 가집니다.
- A/B 신호가 정확히 90° 위상을 유지
- 펄스 폭 일정
- rising/falling edge가 선명하고 깨끗함
- 노이즈 없이 디지털 수평 상태 유지
- 속도가 빨라도 간격만 변하고 파형 형태는 동일
👉 정상 파형의 기준을 알아야 비정상 파형을 정확하게 진단할 수 있습니다.
⚠️ 이런 파형이 보이면 “문제”가 있는 것이다 (실전 케이스)
① A/B 위상 깨짐
현상: A와 B의 rising edge가 딱 맞거나, 서로 overlap 구간이 발생
주요 원인:
- 기계 진동
- 케이블 접촉 불량
- 리니어 엔코더 헤드–스케일 간격 변화
➜ 결과: 위치 오차 · 역방향 판단 오류 → 검사 기준점이 뒤틀림
② 노이즈로 인해 edge가 튀거나 잘림
현상: A상 또는 B상에 가짜 spike가 생김
주요 원인:
- 모터/서보 EMI
- 인버터 노이즈
- GND 공유 · 접지 불량
➜ 결과: 가짜 펄스 발생 → 위치 값이 갑자기 점프
③ 펄스 폭 불규칙
현상: 펄스 폭이 길었다 짧았다 반복, 간격이 고르지 않음
주요 원인:
- 엔코더 센서 오염
- 헤드 alignment 불량
- 속도 변화에 비해 처리 지연 발생
➜ 결과: 속도 계산 오류 → 타이밍 불안정 → 검사 위치 흔들림
④ 펄스 드롭(누락)
현상: 일정 간격으로 펄스 하나가 통째로 사라짐
주요 원인:
- 케이블 단선/접촉 불량
- 모터에서 발생한 순간 간섭
- PLC 고속 카운터의 처리 한계
➜ 결과: 기준 위치가 틀어져 이미지 위치가 계속 흔들림
⑤ 노이즈 플로팅(지속적인 미세 흔들림)
현상: 디지털 신호의 수평부분이 들쭉날쭉, 미세한 흔들림 지속
주요 원인:
- 접지(GND) 품질 문제
- 노후된 전원 라인
- EMI(전자파 간섭) 누적
➜ 결과: 지터 증가 → 특히 3D 프로파일 품질 악화
🔍 엔코더 파형을 보면 바로 알 수 있는 것들
Signal Scope로 A/B 파형을 보면 다음 항목들을 한 번에 확인할 수 있습니다.
| 확인 항목 | 의미 |
|---|---|
| A/B 위상 정상 여부 | 방향 · 위치 신뢰도 판단 |
| rising/falling edge 품질 | 타이밍 정확도 확인 |
| 펄스 간격 | 속도 안정성 · 가감속 상태 |
| 노이즈 존재 여부 | EMI · 접지 · 배선 문제 여부 |
| 펄스 누락 여부 | 고속 처리 한계/단선 가능성 |
| 속도 변화에 따른 파형 변화 | 라인 제어 품질, 구조적 한계 |
📌 PLC·카메라·조명 문제처럼 보이는 80%의 현상은,
엔코더 파형만 정확히 보면 원인이 크게 좁혀집니다.
🛠 Signal Scope를 반드시 사용해야 하는 이유
PLC 한계:
- Scan Time 동안 신호 변화를 놓침
- µs 단위 edge 흔들림(지터) 확인 불가
- A/B 위상 깨짐을 직접 관찰할 수 없음
- 펄스 튐(toggling) 현상도 모른 채 지나감
Signal Scope 장점:
- A/B 타이밍을 ns 단위까지 분석 가능
- 노이즈 패턴과 간섭 위치를 눈으로 확인
- 펄스 찌그러짐, 드롭을 실시간 관측
- 역방향 모드에서만 나타나는 이상도 확인
➜ 문제가 “어디서” 발생하는지 즉시 범위를 좁혀줍니다.
⏱ 가장 중요한 부분: 파형이 곧 타이밍이다
엔코더 파형 오류는 곧 타이밍 오류로 이어지고,
타이밍 오류는 다시 트리거 · 조명 · 카메라 동기화 오류로 전파됩니다.
엔코더 파형 오류
→ 타이밍 오류
→ 트리거 오류
→ 조명/카메라 동기화 오류
→ 이미지 오류
→ 검사 품질 문제
→ 타이밍 오류
→ 트리거 오류
→ 조명/카메라 동기화 오류
→ 이미지 오류
→ 검사 품질 문제
즉, A/B 파형이 깨지면 머신비전의 모든 기준점이 무너집니다.
파형을 바로 읽을 수 있어야 문제를 빠르게 해결할 수 있습니다.
🧠 핵심 요약
- ✔ 엔코더 파형은 모든 타이밍 문제의 출발점
- ✔ A/B 위상 깨짐 · 노이즈 · 가짜 펄스 · 펄스 드롭은 이미지 위치에 치명적
- ✔ PLC는 파형을 직접 볼 수 없어서 근본 원인 분석이 어렵다
- ✔ Signal Scope는 µs/ns 수준의 실측 파형을 제공
- ✔ 파형만 제대로 보면 문제 범위를 즉시 좁힐 수 있다
🔜 다음 글 예고
👉 No.11 – 왜 3D 검사에서 문제가 더 크게 드러나는가?
제품 문의 & 기술 자료 요청
성원기술 · SWTEC Co., Ltd.
#ETIO
#SCP3D
#SIGNALSCOPE
#성원기술
#머신비전
#2차전지검사
#반도체계측
'제품 기술 이야기 > 3D 기술' 카테고리의 다른 글
| 12장 속도 변화 + 엔코더 노이즈 + 3D의 삼중 문제 구조 (0) | 2025.12.11 |
|---|---|
| 11장 왜 3D 검사에서 문제가 더 크게 드러나는가? (0) | 2025.12.11 |
| 9장 전기적 노이즈가 왜 타이밍에 치명적인가? (0) | 2025.12.11 |
| 8장 Zero Delay가 검사 품질을 어떻게 바꾸는가? (0) | 2025.12.11 |
| 7장 조명·카메라·트리거는 왜 하나의 기준점이어야 하는가? (0) | 2025.12.11 |




